
EPP Pick & Place
Pick & place systems are designed and built to use anthropomorphic robots Ask for more information

Specifications
- COMMUNICATION METHOD: TCP/IP, Ethernet/IP, Profinet, Modbus, OPC UA
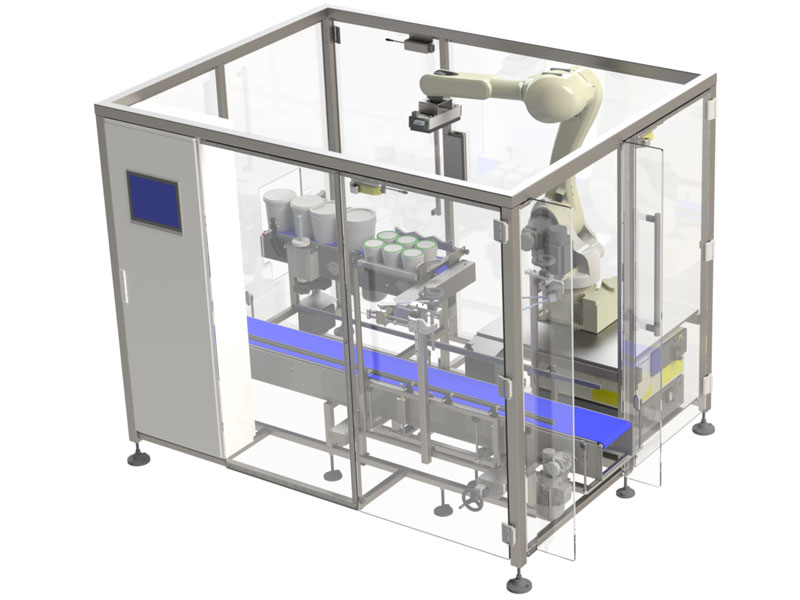
EPP is a pick & place machine with an anthropomorphic robot. EPP has a small footprint, high reliability, and low maintenance needs.
The gripping elements are custom designed for the customer on the basis of three technologies:
- Electromechanical grippers
- Suction grippers
- Magnetic grippers


Compensator
Additional compensators on xyz axes allow the gripper to compensate axes displacements
Electromechanical gripper
Electromechanical universal gripper with a brushless motor and controlled gripping force
Magnetic gripper
Gripper for metal containers such as cans, tin cans, buckets
Quick gripper swapping
The gripper can be swapped quickly, either manually or automatically.
Suction gripper
Gripper with a vacuum pump or venturi tube for products with a regular surface


